Resilience in Heterogeneous Robot Teams
Resilient Task Allocation in Heterogeneous Robot Teams: RA-L 2021, TR-O 2021
Adaptive and Risk-Aware Behaviors: arXiv 2021, ICRA 2020
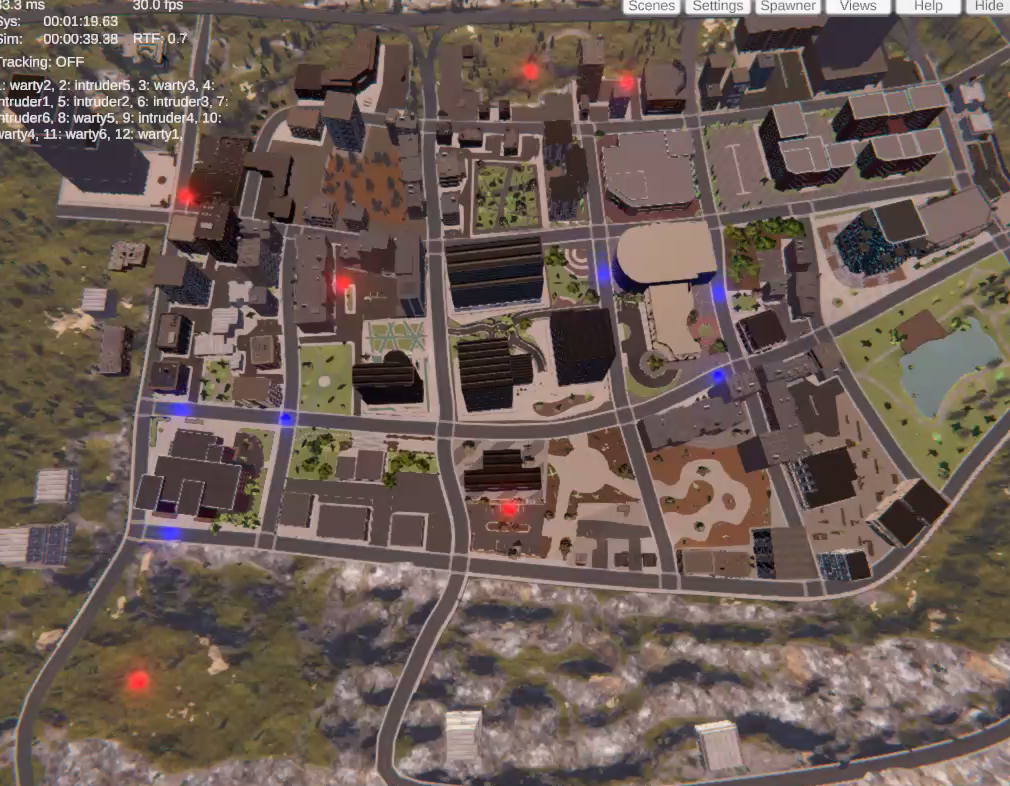
High-Fidelity Multi-Robot Simulations: DCIST

Scalable Algorithms for Robot Swarms
Encounters as Information Sources: T-RO 2019,Swarm Intelligence 2019, ICRA 2019, IROS 2019
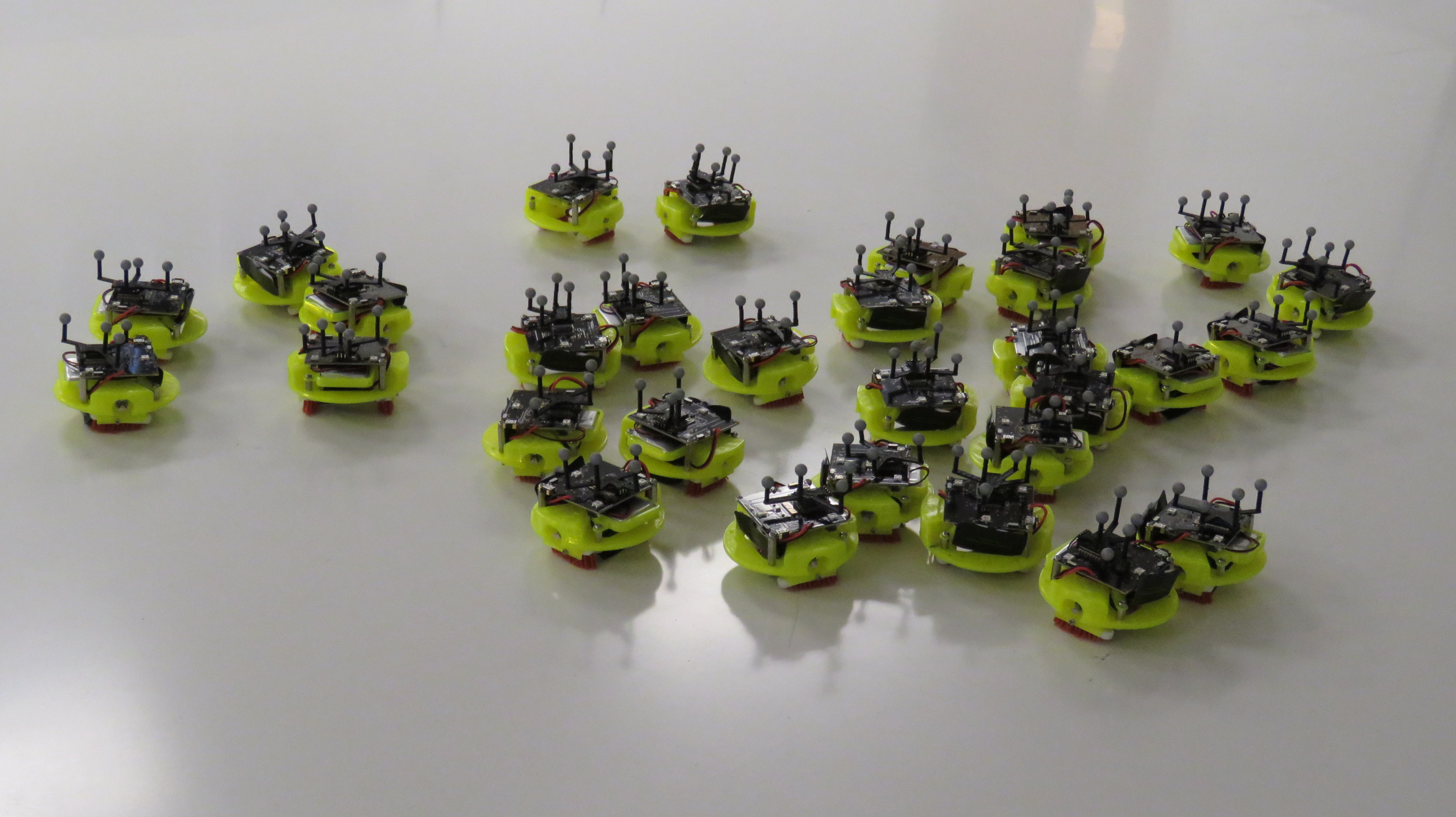
Robot Design
Robotarium: Control Systems Magazine 2020
Brushbot Swarms: Quixotic Robotics, IROS 2019