
Graph Neural Networks for Multi-Robot Coordination
Using structured communication and learning to coordinate robot teams—going beyond simple local rules to achieve globally effective behaviors.
Research spanning multi-robot coordination, swarm intelligence, and autonomous systems—from learning-based controllers to physical robot platforms.
Using structured communication and learning to coordinate robot teams—going beyond simple local rules to achieve globally effective behaviors.
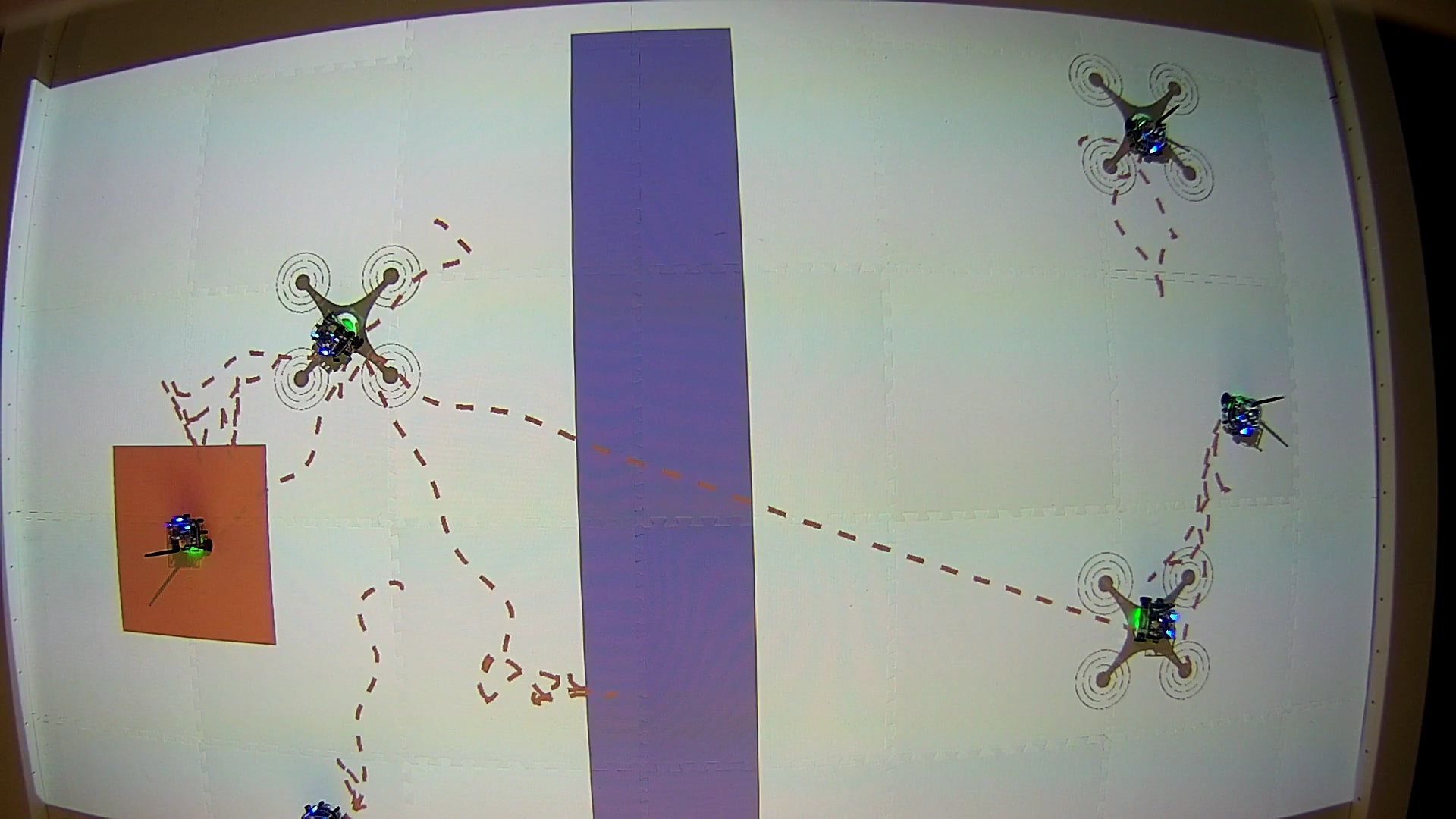
How do you keep a robot team working effectively when things go wrong? Algorithms that assign the right robots to the right tasks—and adapt when robots fail ...
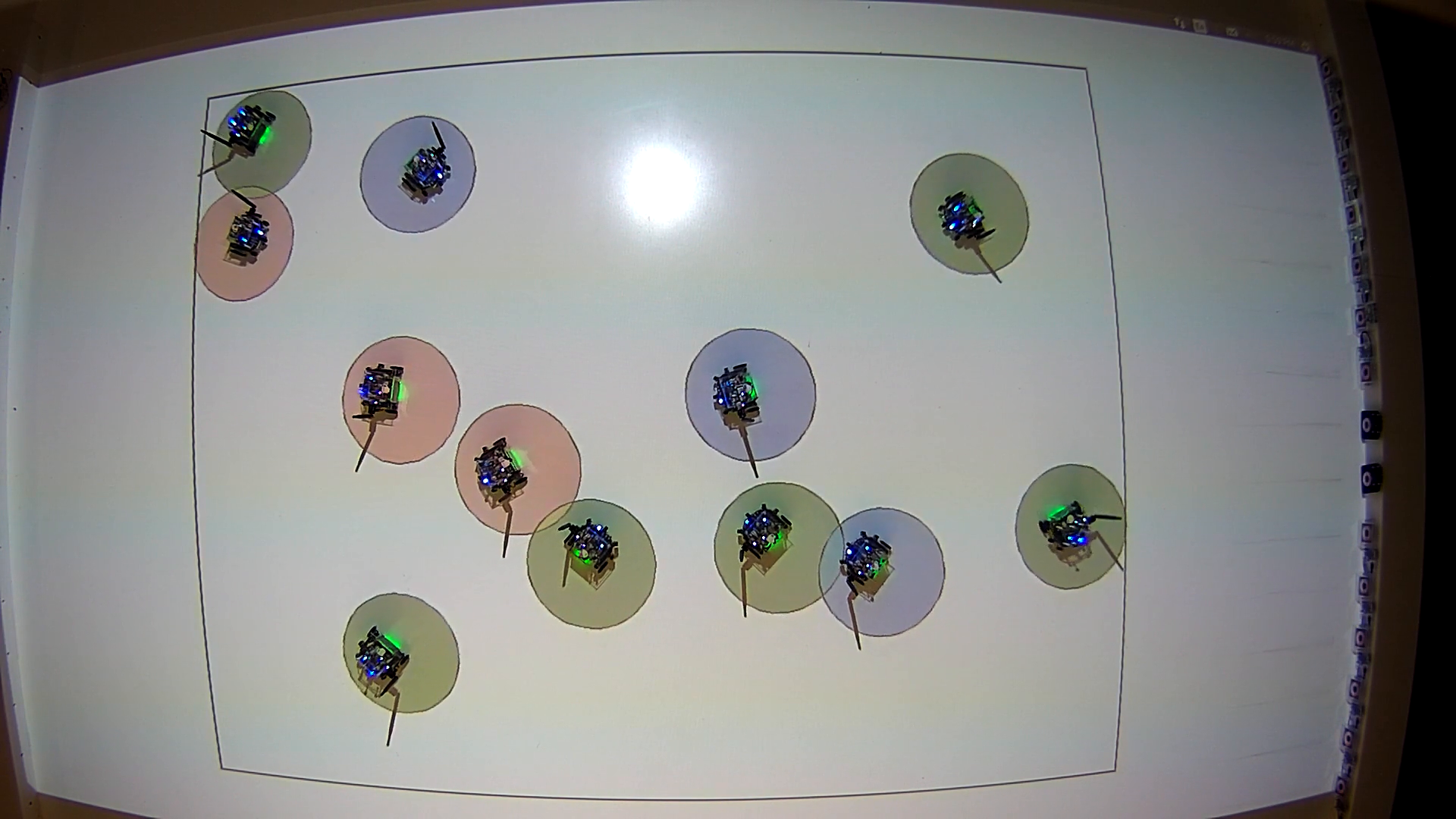
Using ideas from biology and statistical mechanics to enable swarm robot behaviors leveraging local encounters as a source of information.
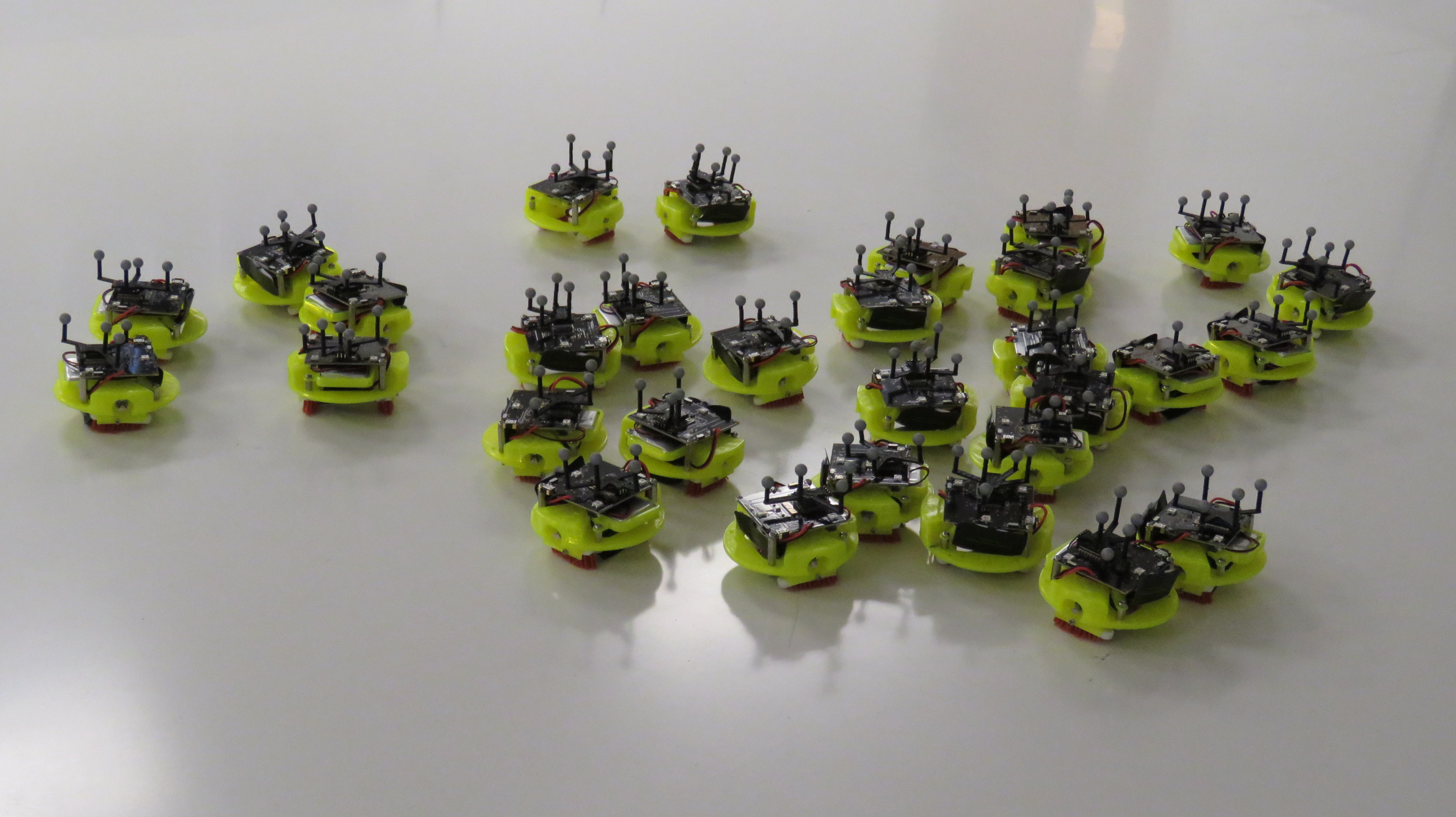
From low cost vibration-driven Brushbots to the Robotarium—creating physical platforms that let anyone experiment with swarm robotics.